robotika-a-iot
AIoT v roce 2025: Spojení AI a IoT mění průmysl
AIoT spojuje senzory a algoritmy: rozhoduje na okraji sítě, snižuje latenci a přináší autonomii do výroby, dopravy i zdravotnictví.
2025-05-04
3 minuty čtení
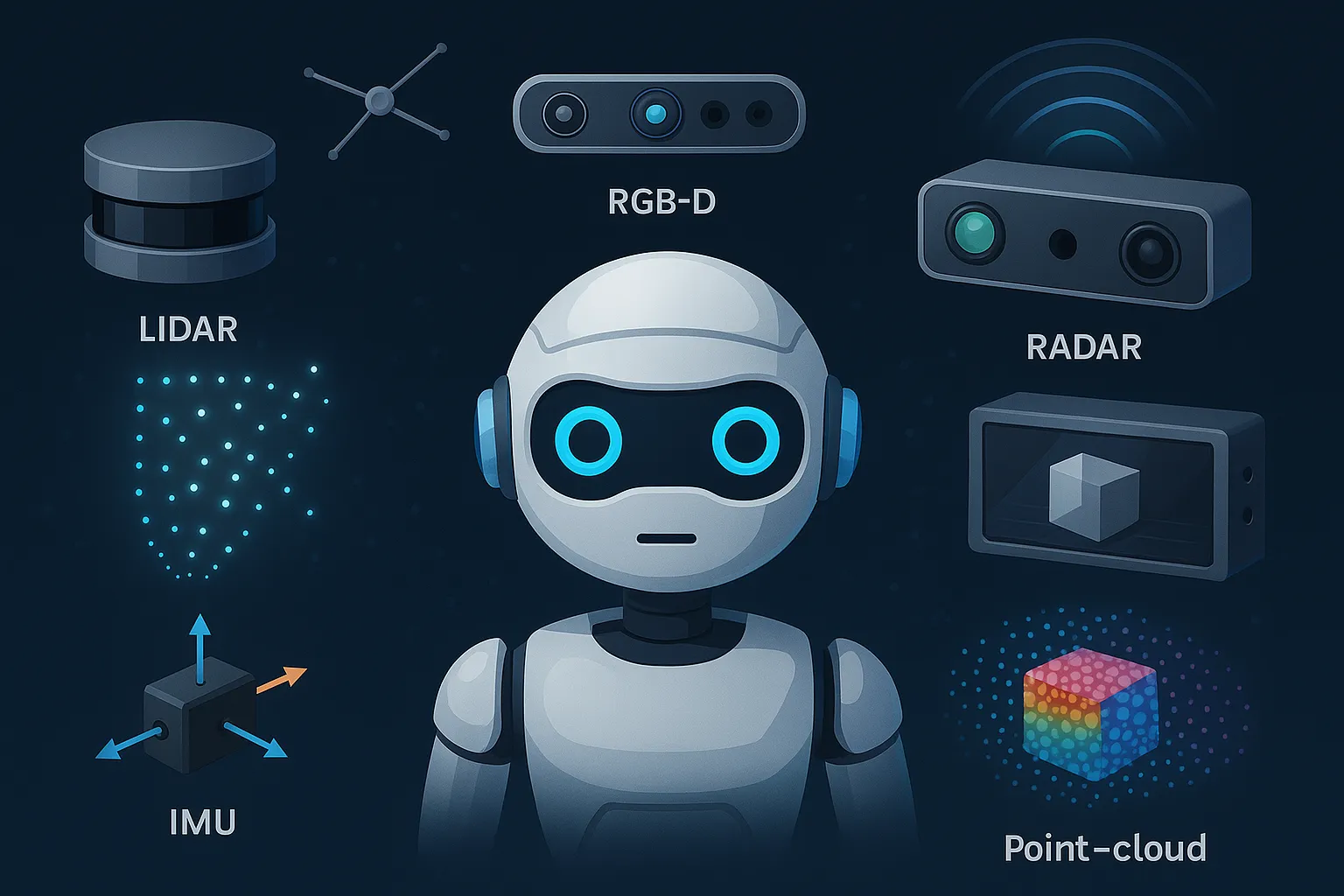
Od odometrie a IMU přes kamery, RGB‑D a lidar až po radar, GNSS a fúzi do mračen bodů – praktický přehled senzorů pro robotiku.
Aby mohli roboti interagovat se světem, potřebují „smysly“ pro vnímání okolí a vlastní polohy. Volba senzorů závisí na úloze, prostředí, nárocích na přesnost i nákladech – typicky se kombinuje více technologií pro robustní výsledek.
Odhad polohy z interních senzorů (např. enkodéry na kolech). Relativní odometrie integruje rychlost → polohu (akumuluje chybu), absolutní využívá přesné enkodéry (dražší). Citlivá na prokluz či nerovnosti – proto se kombinuje s IMU/lidarem.
IMU (akcelerometr + gyroskop + případně magnetometr) dává rychlé informace o pohybu a orientaci ve 3 osách. Výhody: vysoká frekvence, nezávislost na světle. Nevýhody: drift a citlivost na magnetické rušení.
Univerzální, levné, s bohatými vizuálními informacemi pro detekci objektů, SLAM či navigaci. Potřebují výpočetní výkon a trpí na špatné světlo.
Kombinují RGB s hloubkou (time‑of‑flight nebo strukturované světlo). Umožňují 3D rekonstrukci prostředí, přesnější uchopení a navigaci na krátké vzdálenosti. Omezení: dosah, světelné podmínky.
Laserové měření vzdálenosti (čas letu). Výhody: přesnost, rozsah; využití pro 2D/3D mapování, překážky a plánování tras. Nevýhody: cena a citlivost na mlhu/dešť.
Radiové vlny pro detekci vzdálenosti a rychlosti. Funguje v mlze/dešti/prachu a mimo přímou viditelnost; má nižší rozlišení než lidar, interpretace je složitější.
GPS/Galileo/GLONASS pro outdoor navigaci. Pro vyšší přesnost RTK/DGPS (až centimetrová přesnost). Nevýhody: odrazy v zástavbě, nefunguje uvnitř.
Teplota, vlhkost, tlak, plyn, světelné podmínky… Připojení přes I2C/SPI/UART či bezdrát (BLE/Zigbee/Wi‑Fi). Umožňují reaktivní řízení prostředí (např. kvalita vzduchu, klima).
3D reprezentace prostoru body (x,y,z + barva/odraživost). Využití: 3D mapování, detekce objektů, plánování pohybu v komplexním prostoru. Nevýhoda: velký objem dat → vyšší nároky na výpočty.
Spojení dat (např. odometrie + IMU + lidar + kamery) vyvažuje slabiny jednotlivých technologií. Kalmanův filtr a varianty (EKF/UKF) či grafové optimalizace (factor graph) zvyšují přesnost a odolnost.
Neexistuje „jeden nejlepší“ senzor. Úspěch plyne z chytré kombinace: správná sada pro danou úlohu, kvalitní kalibrace a robustní fúze. Tím získá robot spolehlivé „smysly“ pro reálný svět.
AIoT spojuje senzory a algoritmy: rozhoduje na okraji sítě, snižuje latenci a přináší autonomii do výroby, dopravy i zdravotnictví.
People‑centred smart city: AI, IoT, 5G/edge a digitální dvojčata pro dopravu, energii a lepší život ve městech.
Společné vlastnictví zdrojů, chytré sítě a baterie: jak energie sdílená v komunitě s pomocí AIoT snižuje náklady i emise.